
I work at Noah’s Ark Lab as a Robotics Researcher in Hong Kong since Sep. 2024.
I received my PhD degree from the Department of Computer Science, University of Hong Kong (Hong Kong) under supervision of Dr. Pan Jia (HKU) and Dr. Song Chaoyang (Sustech) in Aug. 2024. I received my B.S. degree from the Department of Precise Instrument, Tsinghua University (Beijing) in 2018. I worked with Dr. Huang Bidan from Tencent Robotics X from April 2021 to July 2022 with the Tencent Rhino-Bird Elite Talent Program.
My research focuses on robotics perception and manipulation using learning-based methods. Specifically, I am interested in: Developing a generic representation for world understanding through vision and tactile sensing; Enhancing decision-making in unstructured environments with rich interactions.
🔥 News
- 2024.09: 🎉🎉 I join Noah’s Ark Lab as a Robotics Researcher in Hong Kong.
- 2024.08: 🎉🎉 Our paper “One Fling to Goal: Environment-aware Dynamics for Goal-conditioned Fabric Flinging “ is accepted by WAFR 2024.
- 2024.5: 🎉🎉 We participated in ICRA 2024 Cloth Competition.
- 2023.11: 🎉🎉 Our paper “Bridging Locomotion and Manipulation Using Reconfigurable Robotic Limbs via Reinforcement” is accepted by Biomimetics 2023.
📖 Educations
- 2019.06 - 2024.08, University of Hong Kong (Hong Kong), Ph.D. in Computer Science.
- 2014.09 - 2018.06, Tsinghua University (Beijing), B.S. in Department of Precise Instrument.
💻 Work Experience
- Jun. 2023 - Aug. 2024, Research Intern, Center for Transformative Garment Production, Hong Kong
- Apr. 2021 - Jul. 2022, Research Intern, Tencent RoboticsX, Shenzhen, China
- Nov. 2018 – Aug. 2019, Research Assistant, Southern University of Science and Technology Shenzhen, China
📝 Publications
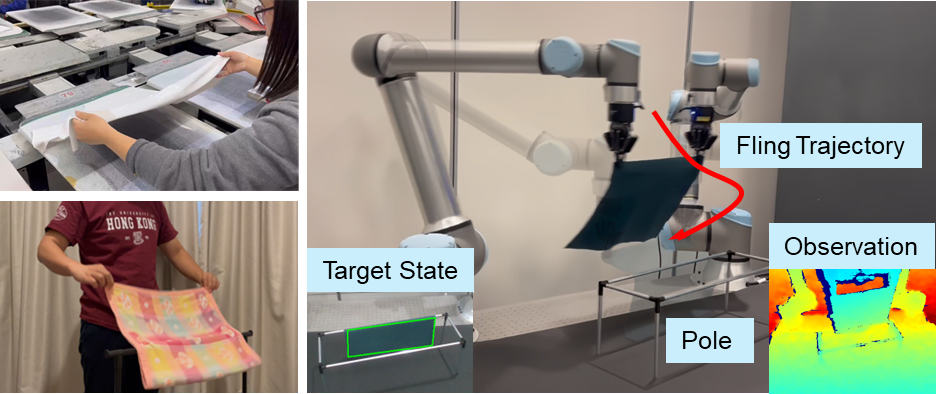
One Fling to Goal: Environment-aware Dynamics for Goal-conditioned Fabric Flinging
Linhan Yang, Lei Yang, Haoran Sun, Zeqing Zhang, Haibin He, Fang Wan, Chaoyang Song, Jia Pan
The 16th International Workshop on the Algorithmic Foundations of Robotics Chicago, USA, October 7-9 2024
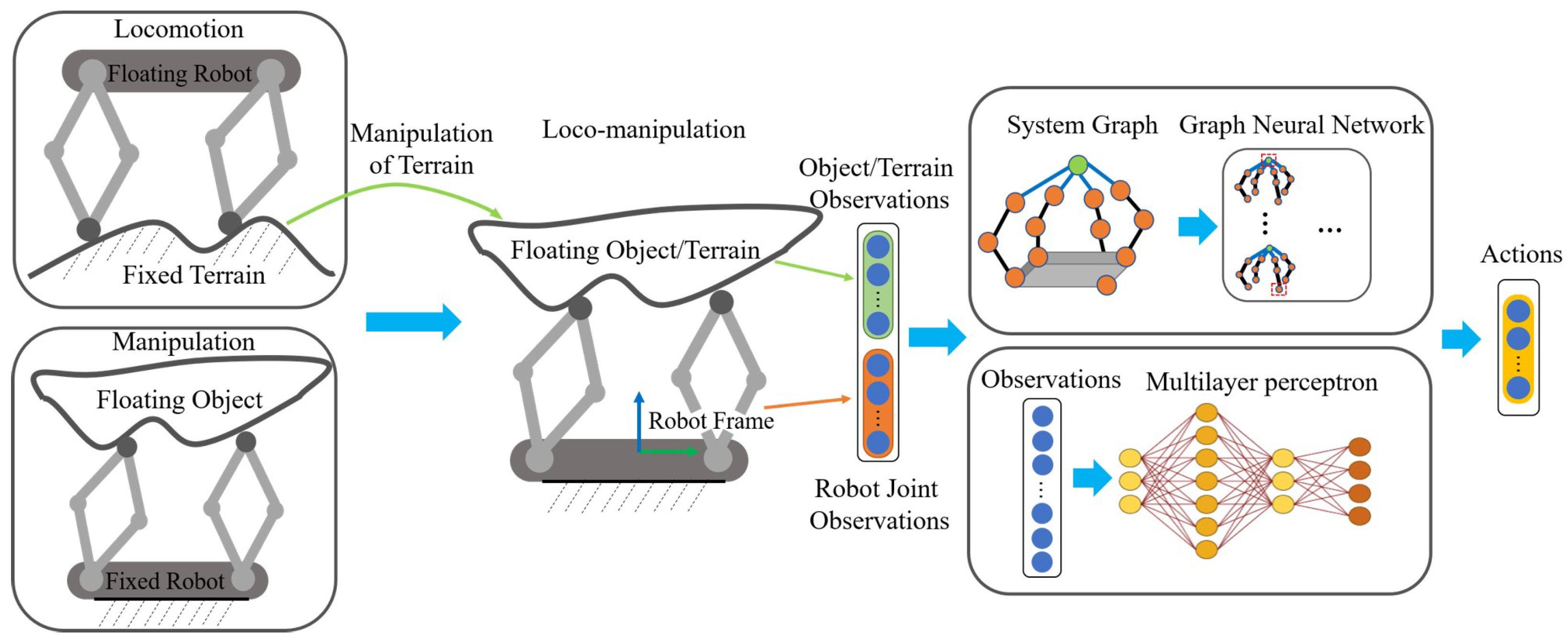
Bridging Locomotion and Manipulation Using Reconfigurable Robotic Limbs via Reinforcement
Haoran Sun*, Linhan Yang*, Yuping Gu, Jia Pan, Fang Wan, Chaoyang Song
Biomimetics, 2023
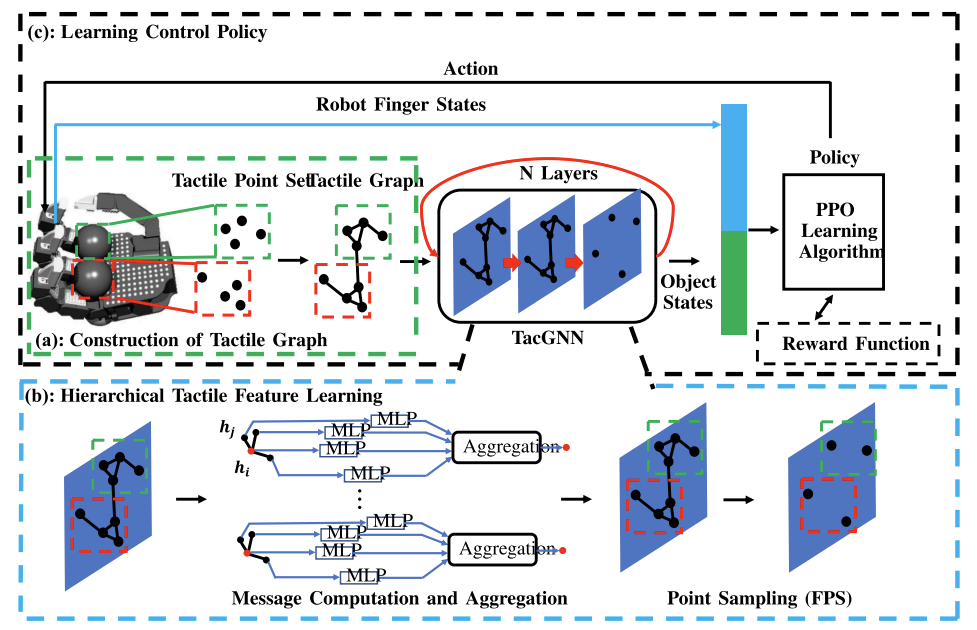
Linhan Yang, Bidan Huang, Qingbiao Li, Ya-Yen Tsai, Wang Wei Lee, Chaoyang Song, Jia Pan
IEEE Robotics and Automation Letters, 2023; IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
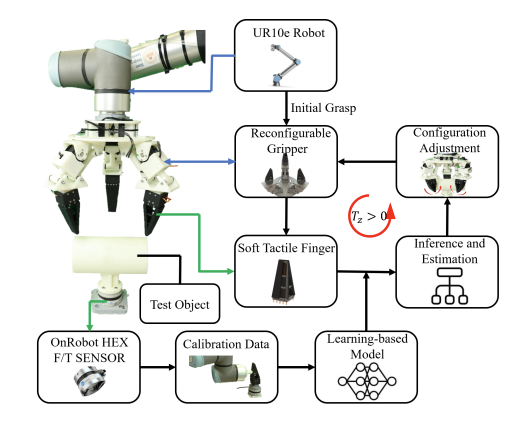
Learning-based optoelectronically innervated tactile finger for rigid-soft interactive grasping
Linhan Yang, Xudong Han, Weijie Guo, Fang Wan, Jia Pan, Chaoyang Song
IEEE Robotics and Automation Letters, 2021; IEEE International Conference on Robotics and Automation (ICRA)
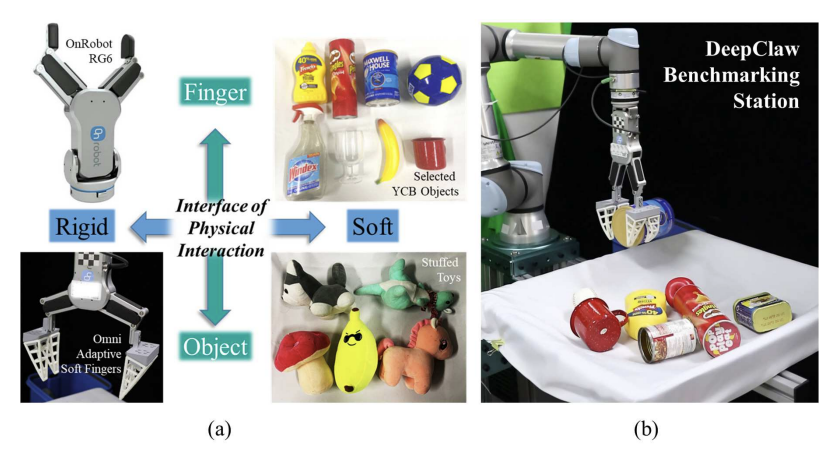
Rigid-soft interactive learning for robust grasping
Linhan Yang, Fang Wan, Haokun Wang, Xiaobo Liu, Yujia Liu, Jia Pan, Chaoyang Song
IEEE Robotics and Automation Letters, 2020; IEEE International Conference on Robotics and Automation (ICRA)
-CafkNet: GNN-Empowered Forward Kinematic Modeling for Cable-Driven Parallel Robots; Zeqing Zhang*, Linhan Yang*, Cong Sun, Weiwei Shang, Jia Pan; Paper
-DeepClaw: A robotic hardware benchmarking platform for learning object manipulation; Fang Wan, Haokun Wang, Xiaobo Liu, Linhan Yang, Chaoyang Song; 2020 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM); Paper
* Equal contribution